

機器人的核心部件構成有哪些?
機器人的構成:
機器人核心部件:
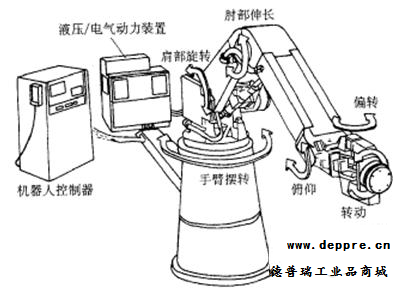
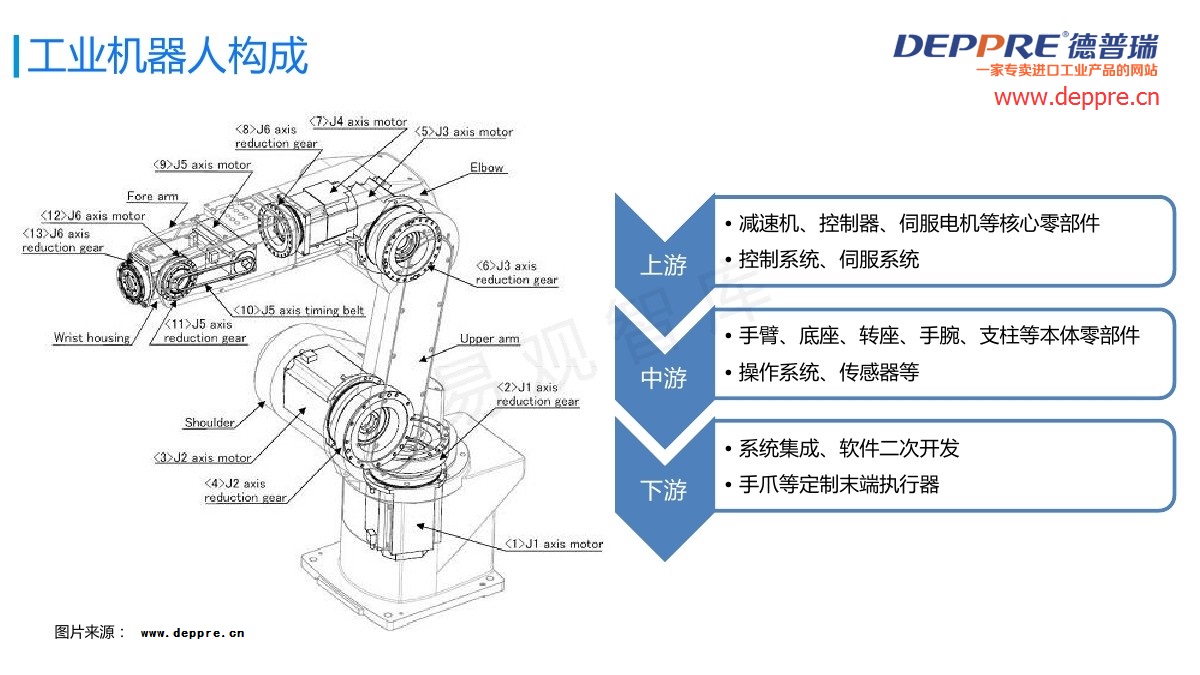
機械手或移動車:這是機器人的主體部分,由連桿,活動關節(jié)以及其它結構部件構成,使機器人達到空間的某一位置。如果沒有其它部件,僅機械手本身并不是機器人。
末端執(zhí)行器:連接在機械手最后一個關節(jié)上的部件,它一般用來抓取物體,與其他機構連接并執(zhí)行需要的任務。機器人制造上一般不設計或出售末端執(zhí)行器,多數(shù)情況下,他們只提供一個簡單的抓持器。末端執(zhí)行器安裝在機器人上以完成給定環(huán)境中的任務,如焊接,噴漆,涂膠以及零件裝卸等就是少數(shù)幾個可能需要機器人來完成的任務。通常,末端執(zhí)行器的動作由機器人控制器直接控制,或將機器人控制器的信號傳至末端執(zhí)行器自身的控制裝置(如PLC)。
驅動器:驅動器是機械手的“肌肉”。常見的驅動器有伺服電機,步進電機,氣缸及液壓缸等,也還有一些用于某些特殊場合的新型驅動器,它們將在第6章進行討論。驅動器受控制器的控制。
傳感器:傳感器用來收集機器人內(nèi)部狀態(tài)的信息或用來與外部環(huán)境進行通信。機器人控制器需要知道每個連桿的位置才能知道機器人的總體構型。人即使在完全黑暗中也會知道胳膊和腿在哪里,這是因為肌腱內(nèi)的中樞神經(jīng)系統(tǒng)中的神經(jīng)傳感器將信息反饋給了人的大腦。
大腦利用這些信息來測定肌肉伸縮程度進而確定胳膊和腿的狀態(tài)。對于機器人,集成在機器人內(nèi)的傳感器將每一個關節(jié)和連桿的信息發(fā)送給控制器,于是控制器就能決定機器人的構型。機器人常配有許多外部傳感器,例如視覺系統(tǒng),觸覺傳感器,語言合成器等,以使機器人能與外界進行通信。
控制器:機器人控制器從計算機獲取數(shù)據(jù),控制驅動器的動作,并與傳感器反饋信息一起協(xié)調(diào)機器人的運動。假如要機器人從箱柜里取出一個零件,它的第一個關節(jié)角度必須為35°,如果第一關節(jié)尚未達到這一角度,控制器就會發(fā)出一個信號到驅動器(輸送電流到電動機),使驅動器運動,然后通過關節(jié)上的反饋傳感器(電位器或編碼器等)測量關節(jié)角度的變化,當關節(jié)達到預定角度時,停止發(fā)送控制信號。對于更復雜的機器人,機器人的運動速度和力也由控制器控制。機器人控制器與人的小腦十分相似,雖然小腦的功能沒有人的大腦功能強大,但它卻控制著人的運動。
處理器:處理器是機器人的大腦,用來計算機器人關節(jié)的運動,確定每個關節(jié)應移動多少和多遠才能達到預定的速度和位置,并且監(jiān)督控制器與傳感器協(xié)調(diào)動作。處理器通常就是一臺計算機(專用)。它也需要擁有操作系統(tǒng),程序和像監(jiān)視器那樣的外部設備等。
軟件:用于機器人的軟件大致有三塊。第一塊是操作系統(tǒng),用來操作計算機。第二塊是機器人軟件,它根據(jù)機器人運動方程計算每一個關節(jié)的動作,然后將這些信息傳送到控制器,這種軟件有多種級別,從機器語言到現(xiàn)代機器人使用的高級語言不等。第三塊是例行程序集合和應用程序,它們是為了使用機器人外部設備而開發(fā)的(例如視覺通用程序),或者是為了執(zhí)行特定任務而開發(fā)的。
機器人在其工作區(qū)域內(nèi)可以達到的最大距離。器人可按任意的姿態(tài)達到其工作區(qū)域內(nèi)的許多點(這些點稱為靈巧點)。然而,對于其他一些接近于機器人運動范圍的極限線,則不能任意指定其姿態(tài)(這些點稱為非靈巧點)。說明:運動范圍是機器人關節(jié)長度和其構型的函數(shù)。
精度:精度是指機器人到達指定點的精確程度 說明:它與驅動器的分辨率以及反饋裝置有關。大多數(shù)工業(yè)機器人具有0.001英寸或更高的精度。
重復精度:重復精度是指如果動作重復多次,機器人到達同樣位置的精確程度。舉例:假設驅動機器人到達同一點100次,由于許多因素會影響機器人的位置精度,機器人不可能每次都能準確地到達同一點,但應在以該點為圓心的一個圓區(qū)范圍內(nèi)。該圓的半徑是由一系列重復動作形成的,這個半徑即為重復精度。說明:重復精度比精度更為重要,如果一個機器人定位不夠精確,通常會顯示一固定的誤差,這個誤差是可以預測的,因此可以通過編程予以校正。
舉例:假設一個機器人總是向右偏離0.01mm,那么可以規(guī)定所有的位置點都向左偏移0.01mm英寸,這樣就消除了偏差。說明:如果誤差是隨機的,那它就無法預測,因此也就無法消除。重負精度限定了這種隨機誤差的范圍,通常通過一定次數(shù)地重復運行機器人來測定。

 朱先生
朱先生